使用前 これだけは必ずお読みください。
マイティジャブを効果的に使⽤するための必須情報です。意図しない結果による製品破損を防ぐため、以下の内容は製 品使⽤前に必ずお読みください。
1. 定格負荷以下でご使用いただき、予期せぬ傷害にご注意ください。
たとえば、12Lf-20PT-27 製品の場合、定格負荷は20N(約2kg)です。つまり、12Lf-20PT-27製品の場合、20N以下の負荷で使用しなければ製品の寿命を最大化できます。定格負荷より小さい負荷を加えるほど、モータの寿命は向上します。やむを得ず定格負荷以上で使用する場合は、最大定格負荷の2倍以内で、Duty cycleを20%以下に下げ、休憩時間を多く増やしてほしい、この場合Z軸使用はしないことをお勧めします。また、アクチュエータの動作時にかなり大きな力で押して引っ張ることになりますので、動作の際、器具物によりけがをしないようにご注意ください。
2. メカニカルリミット設定と位置移動指令範囲を一致させてください。
サーボモータの機構設置時、サーボモータが動くことができるメカニカル限界値を設定することになります。メカニカルリミット設定後、サーボの位置指令は必ずこの限界内で行わなければならず、そうでなければサーボモータに大きな負荷を与えてオーバーロード保護機能が作動し、これが連続的に繰り返されるとモータ寿命に影響を与え、人為的にオーバーロード保護機能をユーザーが解除した場合、モーターが最終的には必ず焼損することになります。正確な位置制御特性上、メカニカルリミット内で位置命令を与えるように設計されているか、必ず再点検および注意をしてください。
3. デューティサイクルは50%以下に設定してください。
DCモータの特性上、少しも休まないで連続的に動く作業を行うと、モータは最終的に過負荷がかかり、モータを保護するためにオーバーロード保護機能が作動し、モータ電源がオフになります。そのため、モータの動作時間に対して一定時間休むようにするデューティサイクルを設定してください。 デューティサイクルとは、 全使用時間
に対するモータが実際に動作する時間の割合です。つまり、デューティサイクル50%とは、モータが50%の時間を動作すれば50%の時間以上休んでくればモータの効率的な寿命管理が可能です。最適な寿命管理のために、適用時に最大デューティサイクルは50%を超えないようにしてください。 デューティサイクルが少ないほど、モーターの寿命は延びます。
4. 誤配線と接地に注意してください。
当社が提供するコネクタを備えたワイヤハーネスを使用して配線する場合、誤配線の確率はほとんどありません。
ただし、使用者の 状況に応じて当社提供コネクタではなくはんだ付け、あるいは 第三者のコネクタを活用する場合は、通信/電源ライン間の誤配線に注意してください。誤配線をすると、PCボードや特定の電装部品が焼損し、致命的な損傷を引き起こす可能性があります。また、アクチュエータとお客様の通信機器間の共通接地を行うことで、電気ノイズによる誤動作、製品破損を防止してください。MightyZAPユーザーズマニュアル12〜13ページの配線Pin mapを参照して、誤配線にならないように注意してください。
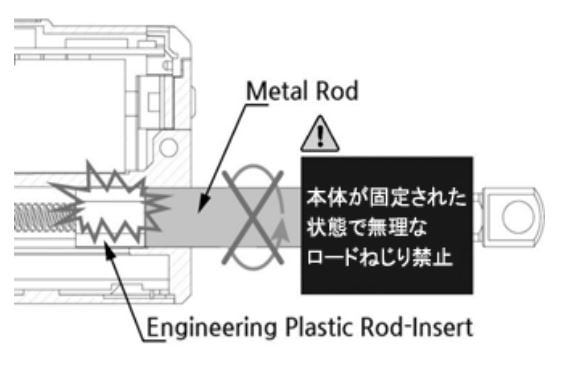
5. ロードエンドアクセサリーの取り付け方法 – ロードねじれ注意
ロードエンドチップ(Rod End Tip)締結時に無理に ロードをねじって回さないでください。
(注意) ロードエンドチップ装着時に本体が固定された状態で無理にロードにねじる力を加えると内部部品(エンジニアリング樹脂ロードインサート/Engineering Plastic Rod-Insert)破損の原因となります。破損防止のため、下記をご参照ください。
[締結方法 – M3スパナを使用]
1) 付属のM3スパナ(⑤)でロードエンド (⑥)をよく捕まえて固定します。 M3ナット(②)を締め付けるときロード(①)がひどく回り、内部部品が破損するのを防ぐためです。
2) 必要に応じて、無頭ボルト(③)またはロードエンドチップ(Rod-end tip)(④)を完全に締める前に適正位置まで回して取り付けます。
3) ロードエンドチップ(④)の角度を希望の角度に合わせた後、M3同梱の別のスパナ(⑦)を使ってM3ナット(②)を締めて位置を固定します(下図のように)ロードエンド(⑥)はM3スパナ(⑤)で固定された状態で進行)。
注意:ロードエンドのM3規格、タッピングホールに、基本提供アクセサリーロードエンドチップ(④)または、無頭ボルトを締結することができ、顧客の要求に応じてM3規格の異なる加工品を取り付けることも可能です。ただし、ロードエンドに対象物を締結時、M3スパナでRod-End(⑥)を必ず固定してください。 M3 スパナで Rod-End(⑥)を固定しないで無理にロード(①)にビットは力を加えると、内部部品部品破損の原因となります。

6. 駆動時のロードの微振動
一部の製品を無負荷で駆動すると、ロードの微小な左右の振れが発生することがあります。この現象は製品の機構組立公差によって多少発生することがありますが、負荷を掛けるとなくなるので使用上全く問題になりません。安心してご使用ください。
7. 駆動時の音
当社のアクチュエータは製品メカニズム特性上、駆動時にメカニカル音が発生します。 (仕様基準:1m距離で50db以下)
また、製品間の音の大きさと音色が多少異なる場合がありますが、いずれも内部テスト基準に合格した製品です。駆動時の音を低減できる方法などについては、当社のウェブサイト(www.mightyzap.com)資料室に参考資料が掲載されています。ただし、製品の特性上、音を大幅に取り除くのは難しく、また音を減らすためには特定部分の性能を下げる必要があります。
8. 無負荷時の速度差
同じ仕様の製品を2個以上購入した場合、無負荷時に各製品の微細な速度差がある場合がありますが、大きな負荷をかけるほどその差が減ります。ただし、製品の特性上、完全に同じ速度が出ませんのでご注意ください。ちなみに、フォースコントロールラインナップの場合、スピードパラメータを利用して、多数の製品のスピードを下側にある程度同期させることができます。
9. 始点/終点の公差(リミットスイッチアクチュエータを除く)
ロードの始点と終点位置は最大+/-0.5mmの公差を許容していますので、参考にしてください。購入するすべてのアクチュエータの開始/終了ポイントを一定にする必要がある場合、ミン/マックスポジションキャリブレーション(
Min/Max Position Calibration)パラメータでユーザー設定が可能で、注文前の事前リクエスト時にカスタマイズ(Customization)操作を通じて開始/終了ポイントを一定にして出荷できます。 (所定のカスタマイジング費用発生)
10. 任意分解禁止
mightyZAPは、多くの精密部品が小さなスペースに密集して組み立てられているため、非熟練者によるランダムな分解や再組み立て時に製品の品質に影響を与える可能性があります。任意の分解/再組み立てを防ぐためにステッカーが貼られており、ステッカーが破損した場合は保証が制限されることをご了承ください。修理/点検が必要な場合[email protected]に連絡してください。